|
|
|
|
|
Questions
1. State the assignment (problem/project) in your own words.
The assignment of this class and this project is to create a custom robot with a custom program to do the act that the robot is assigned to do. for example the sonic sensor, the sonic sensor is programmed to stop when an object is in front of it and go if there is nothing there.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
What we need to know is how to program all the moving elements on the robot.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
STEP 2: create a design for your robot, determine how many motors you want STEP 2: enter labview and design a program to make your robot function STEP 3: test and adjust your robot till its perfect.
4. Describe the final output / product in detail: (what are we looking at?)
At the end of the project the final output is a robot that is designed to do the functions it is asked to do ex. the sonic sensor project the output is to have the sensor programmed to stop at the box and go when the box is not there
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project? Some feed back i got was that we had to redesign our robot which we did, another piece of criticism that we got was we need our program to save so we dont redo it every day
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware,etc ? , I learned how to program a robot and how to transfer it to the robot to make it run
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot. If i were to redo this project i would make my robot have more support.
1. State the assignment (problem/project) in your own words.
The assignment of this class and this project is to create a custom robot with a custom program to do the act that the robot is assigned to do. for example the sonic sensor, the sonic sensor is programmed to stop when an object is in front of it and go if there is nothing there.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
What we need to know is how to program all the moving elements on the robot.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
STEP 2: create a design for your robot, determine how many motors you want STEP 2: enter labview and design a program to make your robot function STEP 3: test and adjust your robot till its perfect.
4. Describe the final output / product in detail: (what are we looking at?)
At the end of the project the final output is a robot that is designed to do the functions it is asked to do ex. the sonic sensor project the output is to have the sensor programmed to stop at the box and go when the box is not there
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project? Some feed back i got was that we had to redesign our robot which we did, another piece of criticism that we got was we need our program to save so we dont redo it every day
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware,etc ? , I learned how to program a robot and how to transfer it to the robot to make it run
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot. If i were to redo this project i would make my robot have more support.
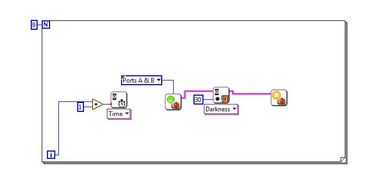
This snapshot is of the program labview used to program the ultrasonic sensor.
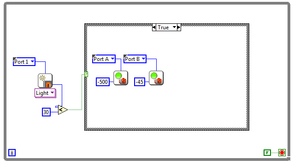
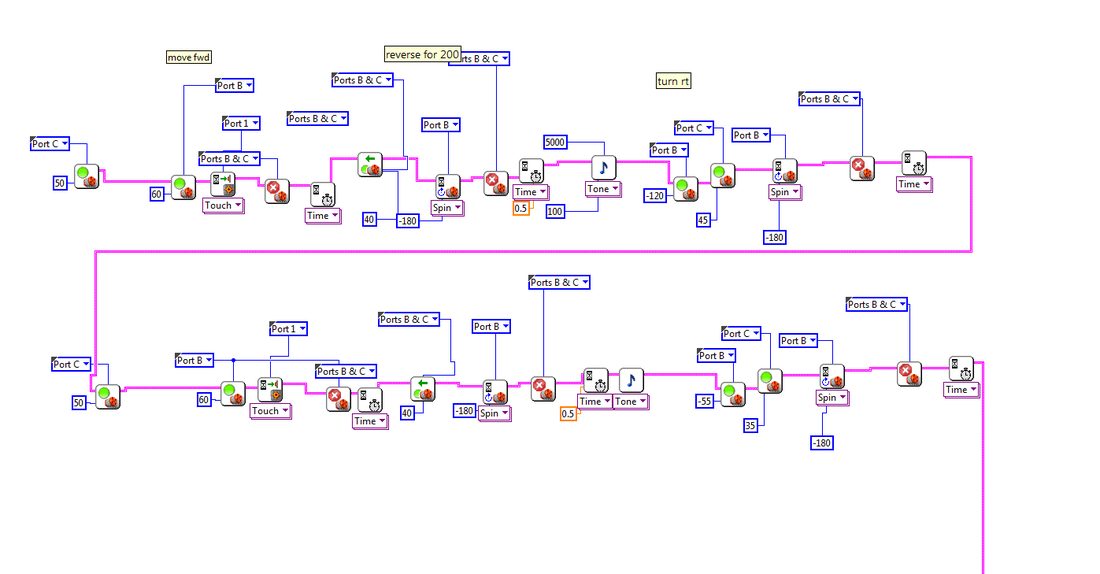
This is the program for the line follower. Below is as well.
|
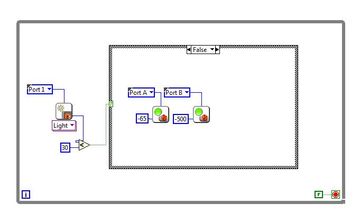
This is what the program looks like when set to false
|


|
Portrayed above is tug of war bot
To the left you can see basketbots |
|
Seen directly above is the grabber robot.
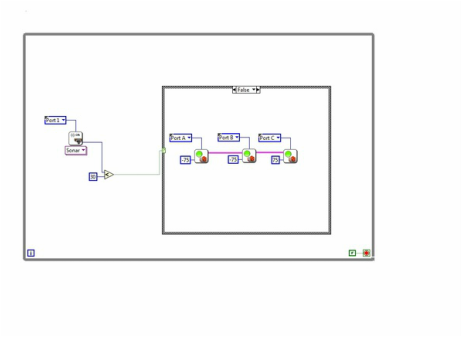
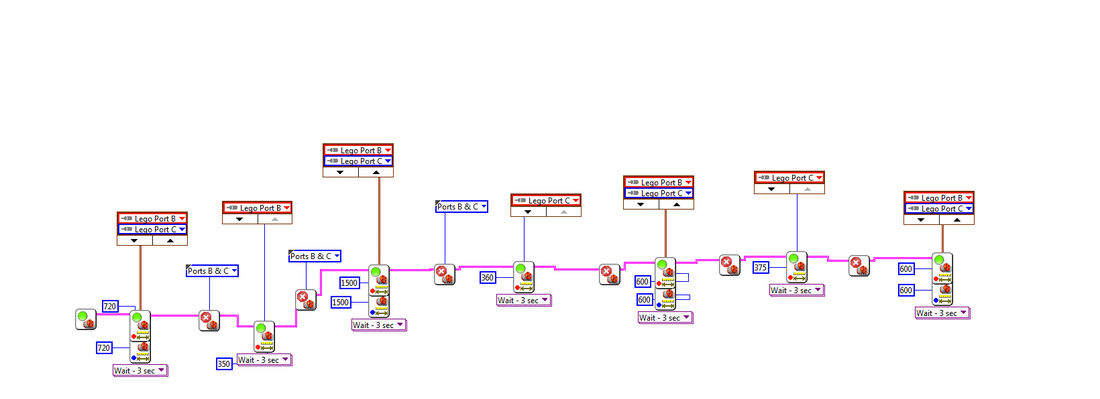
this is the program for the 9 lines robot.